










Seam Tracking with Vision and Through-Arc
Even perfect programs fail when parts vary. That’s why modern welding cells rely on adaptive seam tracking — using vision or through-arc sensing to guide the robot in real time.
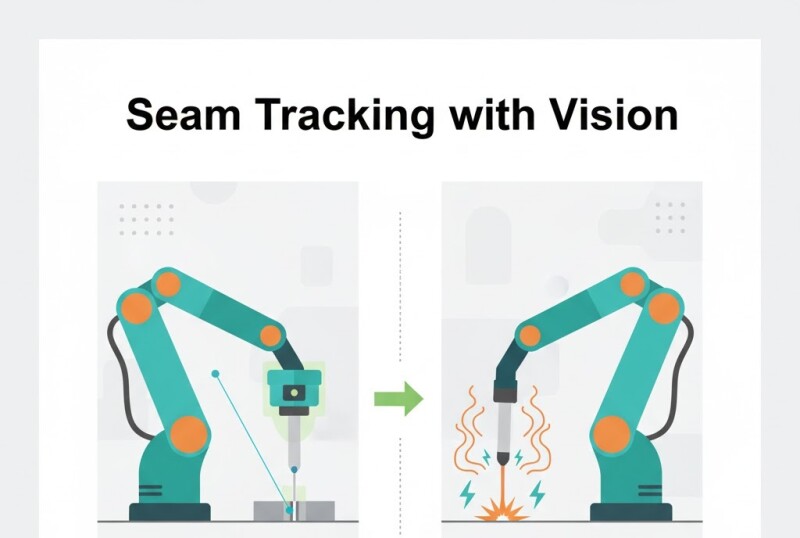
1. Vision-Based Tracking
Laser profilometers or cameras detect joint geometry before each weld. The system dynamically shifts the path to stay within ±0.2 mm of the seam, even with part tolerances.
2. Through-Arc Sensing
Current and voltage variations reveal lateral deviation during welding. Through-arc control is ideal for MIG and TIG but requires clean signal processing and arc stability.
3. Hybrid Tracking
Combining both methods — vision for pre-scan and through-arc for dynamic correction — provides the most robust solution in variable production environments.
Example
A heavy-equipment OEM integrated through-arc seam tracking on 6-axis robots. Rework fell by 35%, and welding speed increased 18%.
Related Articles
- Robotic Welding for SMEs: Fixturing and Programming
- Offline Programming: From CAD to Weld Path
- QA for Welding Cells: Coupons, Coupons, Coupons
Conclusion
Adaptive seam tracking converts static programs into intelligent weld paths. Whether using vision or through-arc sensing, consistency improves — even when parts don’t.

























Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.