










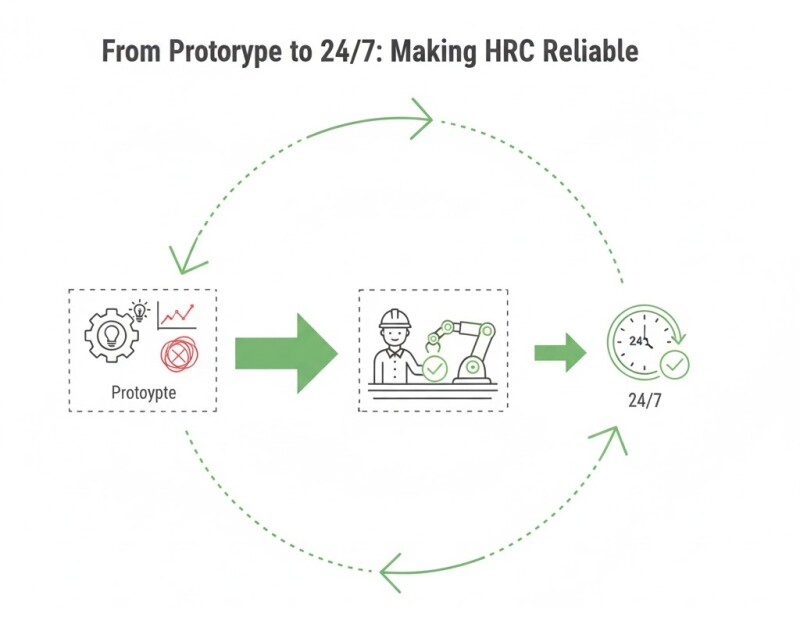
From Prototype to 24/7: Making HRC Reliable
Many cobot projects succeed in pilot form but fail to scale to 24/7 operation. The difference lies not in the hardware — but in how HRC systems are engineered, maintained, and governed once humans and robots share space continuously.
Common Reliability Pitfalls
- Overreliance on manual resets: Human interventions break automation flow.
- Vision degradation: Dust, lighting drift, and camera misalignment reduce consistency.
- Inconsistent tool calibration: Torque and position drift without preventive checks.
Design for Continuous Operation
- Automate restarts and teach points using digital templates.
- Implement predictive maintenance on grippers and joints.
- Use cobot health dashboards for thermal and cycle tracking.
Case Example: Electronics Assembly
A cobot-assisted screwdriving line moved from one-shift testing to 24/7 operation with redundant camera setups and tool wear monitoring. Uptime improved from 83% to 97% within two months.
Related Articles
- 10 Real HRC Applications: Assembly, Screwdriving, and Testing
- Payback Under 12 Months: What These HRC Projects Did Right
- Safety Lessons Learned: Near-Misses That Changed Designs
Conclusion
Scaling HRC means moving from “collaborative” to “dependable.” With structured maintenance, sensor redundancy, and process ownership, cobots can deliver industrial-grade reliability around the clock.

























Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.