










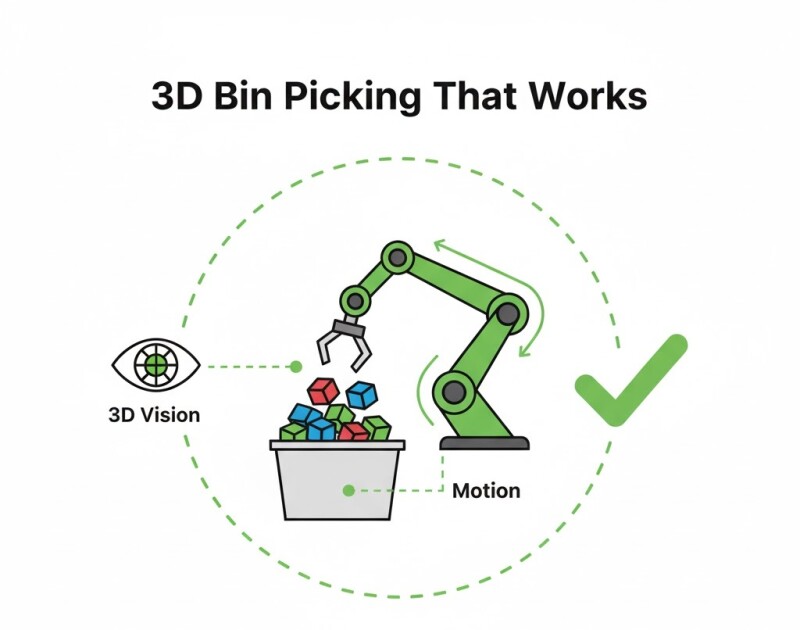
3D Bin Picking That Works: Vision, Motion, and Grippers
3D bin picking promises to eliminate manual sorting and feeding, but in practice, many systems struggle with accuracy and cycle time. Reliable bin picking requires the tight integration of vision, motion planning, and gripper design.
Why 3D Vision Is Hard
Random bin parts create overlapping surfaces, shadows, and reflections. Depth cameras and structured light sensors must handle metallic, glossy, and dark materials without losing point cloud fidelity.
Key Components of a Working System
- 3D cameras: Time-of-flight or laser triangulation models with sub-millimeter precision.
- Pose estimation algorithms: Deep learning and CAD-based matching for orientation detection.
- Gripper design: Mechanical, vacuum, or hybrid types depending on shape and material.
Integration with Motion Control
The robot’s path must be recalculated in real time after each pick, considering collisions, joint limits, and occlusions. Advanced systems integrate real-time regrasping for parts partially visible.
Case Example: Automotive Stamping Line
A Tier-1 supplier deployed AI-driven bin picking for pressed metal parts. Accuracy reached 99.3%, with a 4.5-second average cycle time after adaptive motion tuning.
Related Articles
- Force-Torque Sensing for Delicate Handling
- Path Planning for Random Bins: Practical Tips
- From Sim to Shop Floor: Commissioning Bin-Picking Cells
Conclusion
Reliable 3D bin picking isn’t magic — it’s engineering discipline. By aligning vision accuracy, gripper mechanics, and adaptive motion, factories can achieve fully autonomous part feeding at industrial speeds.

























Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.