










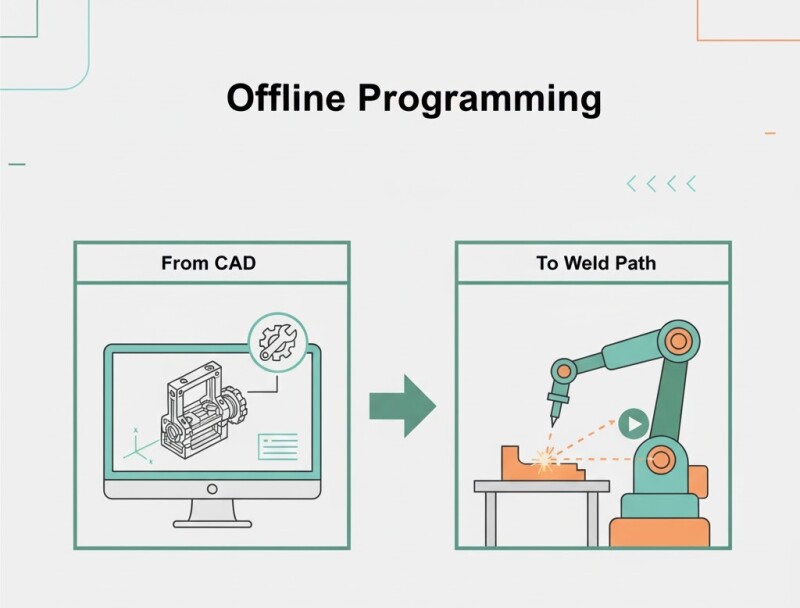
Offline Programming: From CAD to Weld Path
Modern welding robots are programmed as much on the screen as on the shop floor. Offline programming (OLP) transforms CAD geometry into executable weld paths — cutting downtime and increasing flexibility for high-mix production.
1. The Workflow
- Import CAD model and define weld seams.
- Simulate torch orientation and clearance.
- Export robot code directly to controller (e.g., ABB RAPID, KUKA KRL, Fanuc TP).
2. Benefits
OLP eliminates the need to stop production for reprogramming. It allows robot utilization to remain near 90% while new paths are validated offline.
3. Challenges
- Calibration between virtual and physical cell (TCP alignment, fixture offsets).
- Accurate CAD models of real tooling and reach zones.
- Collision avoidance with dynamic reorientation logic.
Example
An automotive Tier-1 supplier created 300+ OLP programs per year using a shared digital twin of its weld cells. Offline simulation cut commissioning time by 45%.
Related Articles
- Robotic Welding for SMEs: Fixturing and Programming
- Seam Tracking with Vision and Through-Arc
- QA for Welding Cells: Coupons, Coupons, Coupons
Conclusion
Offline programming is the bridge between digital design and robotic execution. With good calibration and simulation discipline, it drives faster startups and higher throughput.

























Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.