










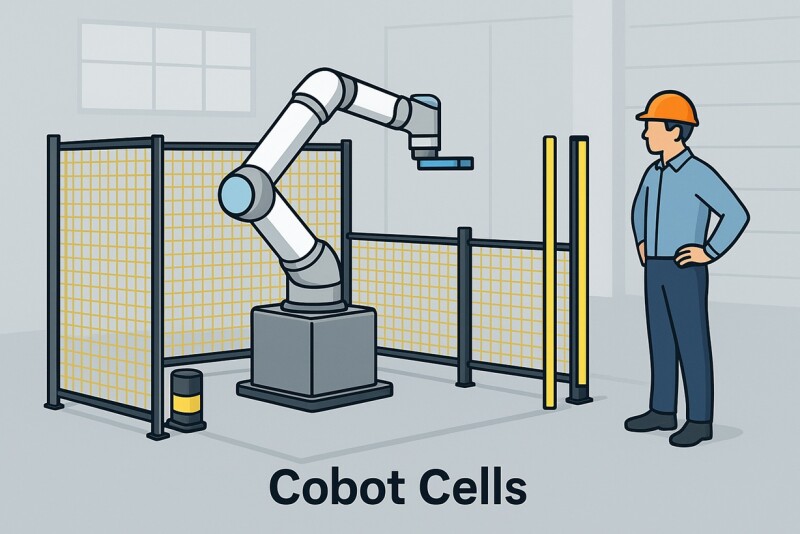
Cobot Cells That Scale: Modular Fencing, Light Curtains, and Safe Sensors
As collaborative robots (cobots) move from single workstations to full-scale production, safety architectures must evolve. A single scanner or low-speed mode may suffice for a pilot project, but scaling to multiple cells requires modular and maintainable safety solutions. This article explains how to design cobot cells that are both flexible and compliant — ready to grow with your factory.
Why Modular Safety Design Matters
Many SMEs start with a single cobot station. Later, they add more robots or expand production lines — and that’s when static safety designs cause problems. Rebuilding fences, rewiring safety relays, or reprogramming scanners can cost more than the original cobot. Modular safety design ensures that expansion is fast, affordable, and compliant with ISO 10218 and ISO/TS 15066.
Scalability also improves OEE analytics across multiple cells, allowing plant managers to monitor uptime, maintenance intervals, and safety stops consistently — a critical step toward connected, data-driven manufacturing.
Key Elements of a Scalable Cobot Cell
A scalable safety system uses standardized modules and plug-and-play sensors. The main components include:
- Modular fencing panels: pre-fabricated aluminum or steel sections that can be rearranged easily.
- Light curtains: define safe access zones without physical barriers, ideal for palletizing or inspection tasks.
- Safety laser scanners: configurable detection zones that adapt dynamically to robot movement.
- Safety controllers or PLCs: centralize logic and enable standardized connections between cells.
This architecture enables rapid scaling — from one cobot to ten — with consistent safety logic and documentation.
Designing for Safety and Efficiency
Safety doesn’t have to mean slower production. Intelligent zoning and sensor fusion allow cobots to operate at full speed when humans are clear, then slow automatically as someone approaches. These Speed and Separation Monitoring (SSM) techniques make safety both dynamic and productive.
For instance, a light curtain at the cell entrance can trigger a safe reduced speed, while a floor scanner provides redundant confirmation before a full stop. Combining multiple sensors ensures both reliability and flexibility. To understand the communication backbone behind this, see OPC UA over TSN Explained — the same deterministic networking concept ensures sensors and controllers stay synchronized in real time.
Wired vs. Wireless Safety Integration
Modern safety networks, such as PROFIsafe and CIP Safety, allow decentralized devices — scanners, relays, emergency buttons — to communicate over Ethernet. This reduces wiring, simplifies diagnostics, and supports reconfiguration without major rewiring. It’s the backbone of scalable automation, similar to the approach used in Edge AI in the Factory deployments where distributed intelligence enables faster decision-making.
Validation and Documentation at Scale
Each safety zone, curtain, and sensor must be validated under ISO/TS 15066. When scaling, maintain a single “master safety file” that records all validation results and risk assessments per module. This avoids duplicated paperwork and ensures consistent compliance.
For help understanding ISO/TS 15066 in practice, see ISO/TS 15066 in Plain English: Force Limits, Tooling, and Real-World Examples.
AI and Smart Monitoring for Safety
Emerging systems use AI-based analytics to track cobot motion, detect blind spots, and predict sensor degradation. When deployed responsibly, these tools enhance uptime and support preventive safety maintenance — a crucial advantage for multi-cell production lines. Similar logic applies in Predictive Maintenance 2025, where sensor health monitoring reduces downtime and optimizes cycle performance.
Scalability Example: Multi-Cobot Palletizing Line
In one food packaging plant, each cobot cell used identical fencing and scanner configurations. When production doubled, engineers duplicated the setup in days instead of weeks. Shared safety controllers synchronized stop signals across all cells, ensuring consistent compliance without new validation costs.
Best Practices for Building Scalable Safety
- Standardize components — sensors, controllers, and panel sizes.
- Document all validation procedures once and reuse templates.
- Use flexible communication protocols (PROFIsafe, CIP Safety, FSoE).
- Test interlocks and emergency stops before expansion.
- Plan physical layout with future cells in mind (extra space, power, cabling).
Related Articles
- Cobot Safety in 2025: A Practical Playbook for Fast, Compliant Deployments
- From Risk Assessment to Run Time: How to Make Collaborative Robots Truly Safe
- 10 Cobot Safety Mistakes SMEs Still Make — And How to Fix Them
- ISO/TS 15066 in Plain English: Force Limits, Tooling, and Real-World Examples
- OPC UA over TSN Explained: Determinism Without Vendor Lock-In
- Edge AI in the Factory: How Smart Devices Bring AI Closer to Production
- OEE Analytics and Performance: How to Measure and Improve Production Efficiency
Quick Q&A
Q: Can cobots operate safely without fences?
A: Yes, if validated under Power and Force Limiting or SSM modes. However, fencing often simplifies compliance and increases speed.
Q: What’s the advantage of modular fencing?
A: It can be reused or reconfigured for new projects, saving both cost and validation time.
Q: How do I synchronize safety across multiple cobots?
A: Use a networked safety controller so all cells share stop signals and diagnostics in real time.
Conclusion
Scalable cobot safety starts with modular design. By using standardized fencing, configurable scanners, and connected safety controllers, you can grow automation capacity without reengineering each cell. It’s the foundation for efficient, compliant, and future-ready collaborative manufacturing.

























Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.